Il lavoro del gruppo dell’Università di Siena guidato dal professor Prattichizzo, dai laboratori di ricerca al trasferimento tecnologico

“Cosa ci fareste con un sesto dito?” Questa la domanda che ha dato il via ad una linea di ricerca fondamentale per il Laboratorio di Robotica del Dipartimento di Ingegneria dell’informazione e Scienze matematiche dell’Università di Siena. Da allora, infatti, il gruppo di ricerca guidato dal professor Domenico Prattichizzo ha iniziato ad affrontare la sfida di creare dei robot indossabili per aumentare le capacità umane o restituirle a chi le ha perdute. Questi studi pionieristici, insieme ad altri del Massachusetts Institute of Technology (Prof. H. Asada) e dell’Università di Tokyo (Prof. M. Inami), hanno contribuito a fondare una nuova branca della robotica, ovvero la “robotica aumentativa”. Tra il 2014 e il 2024 il numero di articoli riguardanti questa tematica è cresciuto e il contributo dell’Università di Siena è stato fondamentale.
“A differenza delle protesi, che sostituiscono arti mancanti, e degli esoscheletri, che rafforzano gli arti esistenti, – spiega il prof. Prattichizzo – i robot aumentativi si vanno ad aggiungere alla funzionalità degli arti biologici. Questo comporta delle sfide tecnologiche notevoli perché i dispositivi robotici devono essere affidabili, sicuri, ma anche leggeri ed ergonomici. Inoltre, la persona che li usa deve riuscire a controllarli come se appartenessero al proprio corpo. Entrano quindi in gioco le interfacce uomo-robot sensorimotorie, dispositivi in grado di creare una comunicazione bilaterale tra i robot e le persone. Consideriamo ad esempio il caso di un dito robotico indossabile: la persona che lo usa deve poterne controllare la chiusura ed essere avvertita di come procede l’azione del robot, corretta ricezione del comando, livello di forza esercitato sull’oggetto preso. L’interfaccia sensorimotoria, quindi, deve, da un lato, registrare il segnale di controllo che viene impartito, per esempio, premendo un pulsante, facendo un movimento, o contraendo un muscolo, e, dall’altro, restituire delle informazioni alla persona attraverso il canale sensoriale più appropriato”.
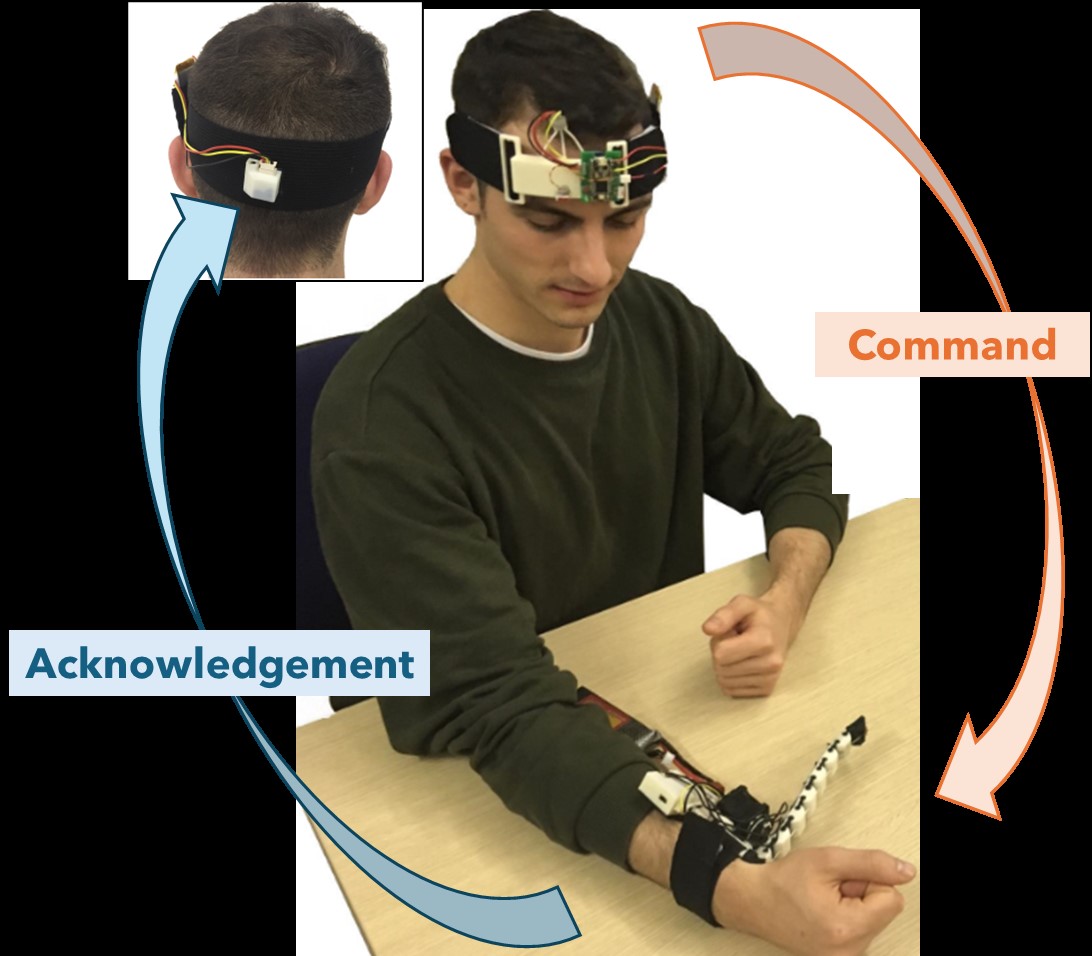 Vista l’esperienza pionieristica maturata nel campo delle interfacce tattili indossabili il gruppo di ricerca si è focalizzato sull’utilizzo di segnali aptici, come vibrazione, pressione e temperatura. L’utilizzo di segnali vibrotattili, per esempio, si è dimostrato fondamentale per avvertire l’utente della corretta ricezione del segnale di controllo da parte del sesto dito robotico comandato tramite un’interfaccia basata su elettromiografia (EMG) attivata contraendo i muscoli della fronte. L’informazione fornita all’utente permette di abbassare lo sforzo muscolare e il tempo richiesti per svolgere delle azioni con il robot.
Vista l’esperienza pionieristica maturata nel campo delle interfacce tattili indossabili il gruppo di ricerca si è focalizzato sull’utilizzo di segnali aptici, come vibrazione, pressione e temperatura. L’utilizzo di segnali vibrotattili, per esempio, si è dimostrato fondamentale per avvertire l’utente della corretta ricezione del segnale di controllo da parte del sesto dito robotico comandato tramite un’interfaccia basata su elettromiografia (EMG) attivata contraendo i muscoli della fronte. L’informazione fornita all’utente permette di abbassare lo sforzo muscolare e il tempo richiesti per svolgere delle azioni con il robot.
Il gruppo dell’Università di Siena si è concentrato sull’idea di aiutare persone affette da paresi dell’arto superiore. Questa applicazione, che ha dato la motivazione al gruppo per continuare a studiare la robotica aumentativa, è nata dalla collaborazione con il Dipartimento di Scienze Mediche e Chirurgiche, ed in particolare tra i professori Domenico Prattichizzo e Simone Rossi.
“Vista l’esperienza del prof. Rossi nel trattamento riabilitativo di pazienti affetti da ictus – spiega Prattichizzo – i primi esperimenti con il sesto dito robotico sono stati condotti con alcune persone con paresi cronica di uno degli arti superiori, per i quali il dito può aiutare a prendere un oggetto opponendosi alla mano paretica che funziona come un palmo. I risultati sono stati entusiasmanti perché hanno mostrato chiaramente le potenzialità del sesto dito robotico come strumento per migliorare la qualità della vita e l’indipendenza dei pazienti” (Video: https://www.youtube.com/watch?v=zbybITNk0N8).
Nel periodo 2020-2024, le evidenti potenzialità del sesto dito robotico hanno portato i gruppi di ricerca dei due dipartimenti ad approfondire le tematiche legate alla robotica aumentativa, portate avanti nell’ambito di progetti finanziati con bandi competitivi nazionali e internazionali, in molteplici direzioni.

“Una delle direzioni più rilevanti intraprese nel periodo 2020-2024 – sottolinea Prattichizzo – è stata quella di studiare come estendere il concetto di robotica aumentativa dalle dita alle braccia. In letteratura ci sono vari esempi di bracci robotici indossabili che però male si adattano ad essere utilizzati da persone con disabilità motorie. Di conseguenza, il gruppo di ricerca si è focalizzato sull’utilizzo di bracci robotici collaborativi attaccati ad una base fissa e connessi alla persona non fisicamente, ma tramite un’interfaccia sensorimotoria indossabile. Il compito dell’interfaccia è quello di far sentire il robot come un’estensione del corpo della persona, pur non essendo direttamente indossato. Alcuni lavori preliminari hanno confermato che l’utilizzo di interfacce tattili può favorire la collaborazione uomo-robot in ambito industriale e nel 2024 i primi esperimenti con dei pazienti hanno dimostrato la fattibilità dell’approccio anche in scenari domestici”.
“Ad esempio, – prosegue – in alcuni esperimenti un paziente post-ictus ha utilizzato un braccio robotico aumentativo per versare dell’acqua in un recipiente. Utilizzando il movimento residuo del braccio paretico la persona riesce a far muovere il robot lungo una traiettoria predefinita e a fermarlo quando l’acqua raggiunge il livello desiderato. Il movimento del braccio della persona viene registrato tramite degli accelerometri indossabili e delle interfacce tattili vibranti avvertono la persona in fasi importanti dell’operazione. I dettagli sul controllo utilizzato sono stati inclusi in un articolo attualmente in revisione per l’International Journal of Robotics Research (IJRR). Utilizzando bracci robotici si possono fare operazioni che richiedono più forza e più destrezza rispetto a quanto si può realizzare con un solo dito robotico. D’altro canto, però, il braccio occupa più spazio e non può essere facilmente trasportato”.

L’obiettivo principale dell’utilizzo di sistemi aumentativi con pazienti con disabilità motorie è quello di dar loro più autonomia nelle attività quotidiane. Tuttavia, una novità introdotta dal gruppo di ricerca dell’Università di Siena è quella di utilizzare questi sistemi anche per motivare l’utilizzo degli arti affetti.
“Le persone che presentano una paresi di un arto superiore, – spiega Prattichizzo – tendono a ridurne l’uso, soprattutto se, come nel caso di pazienti post-stroke, hanno ancora un braccio del tutto funzionante. Per evitare questo, nei sistemi aumentativi sviluppati si è pensato di accoppiare il movimento residuo del braccio paretico al movimento del robot. Quando invece il paziente utilizza un dito robotico indossabile, questo viene montato sull’arto paretico che, in caso di mobilità residua, viene naturalmente portato a muoversi per effettuare l’azione di presa”.
A partire dai risultati incoraggianti ottenuti con i primi esperimenti, il gruppo di ricerca sta sviluppando dei protocolli per studiare l’effettiva motivazione dei pazienti nel riusare l’arto paretico nelle attività di tutti i giorni e la possibile efficacia anche riabilitativa dei sistemi aumentativi.
Oltre a continuare a studiare l’utilizzo di robot aumentativi con pazienti post-ictus in collaborazione anche con la Fondazione Santa Lucia di Roma, il gruppo di ricerca sta estendendo gli studi sulla robotica aumentativa a pazienti con lesione spinale che hanno ancora mobilità residua degli arti superiori (in collaborazione con l’Hospital Nacional de Parapléjicos di Toledo e l’Università Friedrich-Alexander di Erlangen-Norimberga) e pazienti pediatrici con disabilità motorie dell’arto superiore (in collaborazione con la Fondazione Stella Maris di Pisa).
Un’altra direzione di ricerca è quella di studiare il possibile utilizzo di sistemi aumentativi per supportare i chirurghi durante operazioni che richiedono protocolli rigidi e molta assistenza. In questo caso il braccio robotico dovrebbe funzionare non come un agente autonomo, ma come un arto aggiuntivo del chirurgo, sempre sotto il suo controllo.
“Le implicazioni in ambito neurologico/riabilitativo sono molteplici – evidenzia Prattichizzo – in quanto il sesto dito rappresenta una rivoluzione concettuale per tutti i pazienti con paresi della mano, quindi non solo ictus ma anche lesione del midollo spinale, sclerosi multipla a gravi artropatie del pollice. La novità concettuale consiste nel fatto che i pazienti imparano facilmente, in pochi minuti, a utilizzare la nuova presa ibrida fra mano paretica e dito aggiuntivo, e quindi sono estremamente motivati non solo nel riutilizzo dell’arto paretico ma anche nell’effettuazione di movimenti bimanuali, ad esempio aprire un barattolo, potendo quindi riacquisire un certo grado di autonomia nelle attività di vita quotidiana”.
“Anche da un punto di vista conoscitivo neuroscientifico – prosegue – si aprono nuovi scenari, mirati allo studio dei meccanismi plastici di adattamento del cervello alla nuova situazione “bioartificiale” e alla possibilità di allargare il proprio spazio peripersonale di azione, nonché per lo studio dei possibili meccanismi di incorporamento (o embodiment) del sesto dito nel proprio schema corporeo”.
Un altro campo di studio, anch’esso innovativo, è la quantificazione neurofisiologica del “sense of control” di un braccio robotico collaborativo: i soggetti tendono ad essere più confidenti, ammiccando di meno, quando sono in pieno controllo del movimento di un braccio robotico che si avvicina alla loro faccia, invadendone lo spazio peripersonale.
“Quando parliamo di robotica aumentativa – evidenzia Prattichizzo – non ci riferiamo esclusivamente a concetti specifici come arti soprannumerari o robotica indossabile. Piuttosto, parliamo di paradigmi di interazione uomo-robot in cui l’essere umano mantiene sempre il controllo e la consapevolezza del compito, anche in sistemi altamente complessi e integrati. La visione della robotica aumentativa, che questo caso di studio definisce, va ben oltre le applicazioni mediche e ha un significato molto più profondo. Stiamo entrando in un’era in cui robot e intelligenza artificiale raggiungeranno livelli di prestazione sempre più avanzati. La robotica aumentativa contribuisce a immaginare e disegnare la società del futuro, dove esseri umani, robot e IA, convivono in una sinergia profonda e armoniosa garantendo che l’essere umano rimanga in un ruolo centrale. Un ruolo essenziale, simile a quello delle ‘chiavi intelligenti’ delle nostre auto, che disattivano l’intero sistema operativo del veicolo in assenza della chiave. È questa la visione della robotica aumentativa”.

Il team interdipartimentale dell’Università di Siena ha ottenuto finanziamenti per oltre 5,4 milioni di euro per progetti di robotica aumentativa, sviluppando soluzioni innovative per la riabilitazione motoria, sensoriale e cognitiva, e lo studio delle basi neurali dell’interazione uomo-macchina. Queste ricerche, realizzate con partner nazionali e internazionali, consolidano il ruolo dell’Ateneo senese nell’innovazione in robotica. Nel periodo 2020-2024, il team ha vinto bandi di ricerca competitivi con un progetto europeo come coordinatore (HARIA) e tre progetti nazionali come beneficiario (PNRR THE, PNRR Fit4MedRob, PRIN PNRR e-HAND), che affrontano diversi aspetti legati allo sviluppo del sesto dito e altre tecnologie aumentative. Il progetto HARIA, in particolare, ha avuto un forte impatto sulla visibilità locale, nazionale ed internazionale dell’Università di Siena.
In termini di trasferimento tecnologico, gli studi sulle interfacce sensorimotorie hanno portato nel 2018 alla fondazione della startup WEART Srl che nel 2021 ha lanciato il suo primo prodotto, il TouchDIVER, e nel 2024 ha presentato la sua seconda generazione, il TouchDIVER Pro. Nel 2022 WEART ha ottenuto il brevetto “Haptic Ring” US11285291B2. La collaborazione con WEART ha portato all’istituzione nel 2021 del laboratorio congiunto WEARLab. Il laboratorio sviluppa tecnologie per la digitalizzazione delle interazioni tattili, applicabili in realtà virtuale, aumentata e comunicazione tattile. WEARLab studia la percezione tattile, digitalizza le proprietà fisiche dei materiali e realizza prototipi per validare algoritmi di rendering tattile, con un finanziamento annuo di 15.000 €. Il laboratorio congiunto è in fase di rinnovo per altri tre anni.
Gli studi sul sesto dito robotico hanno portato nel 2019 alla fondazione della startup EXISTO , che ha ingegnerizzato una versione commerciale del dito robotico. EXISTO collabora con rinomati centri di riabilitazione in Italia, tra cui Villa Beretta (Lecco), Don Gnocchi (Milano, Brescia, Torino), Policlinico Riuniti (Foggia) e altre strutture specializzate. Dopo due anni di sviluppo e test sul campo, la startup sta lanciando il dispositivo nel mercato attraverso un network di partner per la fisioterapia e la terapia occupazionale.