The global shortage of medical personnel, highlighted by the COVID-19 pandemic, has clearly shown how crucial it is to have tools capable of supporting healthcare professionals in their most delicate tasks.
The MECO project—short for “MEdical COllaborative Robotic Grippers and Interfaces”—was created in response to this need. Its aim is to envision a new generation of collaborative robots capable of assisting surgeons in the operating room.

The project is led by Professor Gionata Salvietti from the Department of Information Engineering and Mathematical Sciences at the University of Siena, in close collaboration with colleagues from the SIRSLab, headed by Professor Domenico Prattichizzo.
MECO aims to develop an integrated system composed of a collaborative robotic arm, innovative grippers, wearable interfaces, and advanced control algorithms.
“It is essential to emphasize that the robot does not replace the surgeon, but rather extends their capabilities”, Salvietti explains. “It can hold a retractor to keep the surgical field open, handle a suction device, or pass instruments—allowing the physician to retain full control over the surgical act”.
The core of the project is collaboration: humans and machines share the same space and work toward a common goal, communicating through simple and intuitive interfaces.
“Thanks to their versatility, compact size, and ease of use”, notes the Professor, “collaborative robots can become valuable assistants not only in operating rooms but also in hospitals and humanitarian emergencies”.
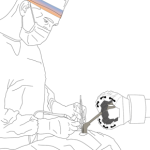
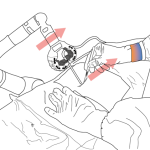
The grippers (robotic pincers) developed in MECO are modular and sterilizable, designed to adapt to various surgical instruments without the need for complex tool-changing mechanisms.
The wearable interfaces, meanwhile, allow the surgeon to send quick commands to the robot and receive tactile feedback during procedures through discrete skin stimulation that does not interfere with manual work.
This bidirectional communication between surgeon and robot ensures fluidity, safety, and mutual awareness.
From a scientific perspective, MECO represents a significant step forward compared to traditional robotic surgery systems, which rely almost exclusively on teleoperation.
“Here the robot acts as a true collaborator”, the researcher continues, “capable of following the surgeon’s movements, anticipating intentions, and adapting in real time to the surgical context”.
Two use cases will guide development and testing: the management of the suction tool and the use of the retractor—operations common to many types of surgery. Validations will be performed on surgical phantoms in close collaboration with surgeons from the Siena University Hospital.
“The idea behind the MECO Project is not just to propose a new technology, but to create the foundations for a new kind of surgery in which robots become true allies of physicians—helping them focus on the most critical aspects of patient care and increasing the overall safety of procedures”, concludes Prof. Salvietti. “In the future, the solutions developed could also find applications in other medical—and even non-medical—contexts, such as home assistance or field emergencies”.